
Классификация систем позиционирования и мониторинга
Системы, способные определять местоположение мобильных объектов и осуществлять их мониторинг работают в реальном масштабе времени, поэтому в литературе их называют RTLS (Real Time Location Systems – системы локального позиционирования в реальном масштабе времени). Классификацию таких СПМ – RTLS систем осуществляют на основании многочисленных параметров и признаков.
Такими признаками являются:
- назначение;
- масштабы зоны обслуживания;
- применяемые технологии;
- способ использования координатной информации.
Классификация СПМ по назначению
В зависимости от направленности решаемых задач можно выделить:
- системы общего назначения;
- специальные системы и системы военного назначения;
- промышленные (производственные) системы.
При этом существует значительная часть признаков, которые позволяют относить систему более чем к одной группе. Например, широко используемые системы глобального позиционирования GPS и ГЛОНАСС можно отнести как к системам общего назначения, так и к специальным. А некоторые системы общего назначения по своим задачам и используемым технологиям можно классифицировать как производственные.
Говоря о возможности СПМ решать свои задачи в зависимости от условий размещения мобильных объектов, целесообразно выделить:
- СПМ для работы на открытых пространствах;
- СПМ для работы в закрытых пространствах – здания, сооружения, тоннели, ангары, производства и т.д.
Классификация СПМ по масштабам зон обслуживания
В зависимости от масштабов зон обслуживания систем, СПМ определяются как:
- глобальные;
- региональные;
- зональные;
- локальные.
Такое деление определяет максимально возможные масштабы зоны обслуживания, но не ограничивает масштабирование системы «вниз».
Глобальные системы позиционирования предназначены для определения местоположения мобильных объектов на всей поверхности Земли. Они используют сигналы навигационных спутников, требуют наличия радиовидимости между спутниками и устройствами, осуществляющими навигацию, поэтому могут функционировать только на открытом пространстве.
При определенных условиях задачи глобального позиционирования также способны решать сети мобильной связи.
Региональные СПМ способны решать задачи позиционирования и мониторинга мобильных объектов в границах региона – мегаполиса, области, республики, небольшого по территории государства или территории площадью до 300 тыс. кв. км с помощью:
- сетей мобильной связи;
- систем цифровой подвижной транкинговой радиосвязи (СЦПТР);
- радиолокационных станций (РЛС) и систем.
Многие технологии и решения, примененные впервые в РЛС, впоследствии нашли свое применение в системах позиционирования и мониторинга. Например, использование радиосигналов с линейной частотной модуляцией (ЛЧМ), ранее применявших только в военных РЛС, в современных СПМ обеспечивает:
- повышение помехоустойчивости;
- устранение неоднозначности определения дальности до мобильного устройства;
- значительное повышение точности позиционирования – фактически можно говорить об измерении, а не об определении координат в системах локального позиционирования.
Зональные СПМ предназначены для контроля и мониторинга местоположения мобильного объекта в границах некой зоны – территории, площадь которой лежит в пределах от нескольких гектаров (предприятие, небольшой населенный пункт) до нескольких десятков квадратных километров (промышленная зона, аэропорт, город и др.).
Позиционирование и мониторинг подвижных объектов в зональных системах может производиться с использованием:
- сетей мобильной связи;
- сетей микросотовой связи DECT
- систем цифровой подвижной радиосвязи;
- радиосетей Wi-Fi (стандарт IEEE 802.11a/g/n);
- локальных радиосетей на устройствах малого радиуса действия, определенных решением ГКРЧ № 07-20-03-001 от 7 мая 2007 г.
- ZigBee (стандарт IEEE 802.15.4);
- nanoLOC (стандарт IEEE 802.15.4a).
Визуализация трассы движения автомобиля на перроне аэропорта при мониторинге показана на рис. 1.

Локальные системы мониторинга предназначены для определения местоположения мобильных объектов на ограниченных открытых территориях, в помещениях зданий и в закрытых пространствах.
Главной особенностью таких систем является возможность обеспечения позиционирования и мониторинга людей, техники, иных физических объектов, перемещающихся в пределах:
- больших производственных зданий (в том числе в подвалах);
- офисных центров;
- тоннелей, шахт;
- ангаров и других сооружений на территориях аэропортов;
- складских помещений с большой площадью;
- территорий исправительных учреждений.
Иначе говоря, везде, где использование для определения координат мобильного объекта применение GPS/ГЛО-НАСС-приемников невозможно.
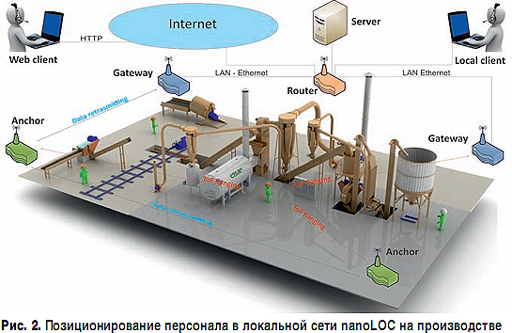
Позиционирование персонала в сети nanoLOC на производстве показано на рис. 2.
Частным видом локальных систем можно считать СПМ, использующие для измерений ультразвуковой, инфракрасный или оптический диапазоны. Такие системы являются узкоспециализированными, наряду с высокой точностью они имеют ряд недостатков, значительно ограничивающих их применение. Поэтому далее в настоящей публикации упоминаться не будут.
Средствами, способными обеспечить решение задач локального позиционирования и мониторинга, могут быть:
- сети микросотовой связи DECT;
- системы цифровой подвижной транкинговой радиосвязи в сочетании с радиозакладками-«маяками»;
- радиосети Wi-Fi (стандарт IEEE 802.11a/g/n);
- радиосети Bluetooth (стандарт IEEE 802.15.1);
- радиосети ZigBee (стандарт IEEE 802.15.4);
- радиосети nanoLOC (стандарт IEEE 802.15.4a);
- радиосети, использующие технологии и протоколы, адаптированные для измерения расстояний (ISO24730-2, CSS/ISO24730-5, NFER, UWB), либо оригинальные.
Представление мест нахождения персонала в офисе при мониторинге с помощью радиосети Wi-Fi (IEEE 802.11a/g/n) может иметь вид, приведенный на рис. 3.

Таким образом, в любой системе позиционирования определение координат мобильного объекта производится с помощью заранее развернутой инфраструктуры – сети средств измерений автоматизированной системы, координаты которых заведомо известны.
Следует понимать, что глобальные, региональные и зональные системы в чистом виде разработаны и применяются, как правило, для решения специализированных задач. В то же время многие СПМ общего назначения, использующие две и более технологии, могут относиться к системам разного масштаба (уровня).
Классификация по технологиям позиционирования
Определение координат объектов в любых системах позиционирования и мониторинга может выполняться с использованием одной из двух технологий:
- с помощью спутниковых (глобальных) навигационных систем;
- посредством развернутой наземной инфраструктуры средств измерений – точек доступа и базовых станций радиосетей различного назначения, стандарта, класса:
- базовые станции мобильной связи, находящиеся в точках с известными координатами;
- РЛС, расположенные на позициях с определенными координатами;
- точки доступа стандарта IEEE 802.11a/g/n (Wi-Fi), 802.15.4 (Zig-Bee), 802.15.4a (nanoLOC) корпоративных или технологических сетей, «привязанные» к конкретным точкам на плане здания, сооружения, территории;
- автономные приемопередатчики – закладки-«маяки», находящиеся в известных по плану здания или сооружения точках и предназначенные для позиционирования абонентов СЦПТР;
- радиосети стандарта UWB (Ultra-Wide-Band).
Единственными стандартами из перечисленных, изначально разработанными для измерения расстояний по радиоканалу, являются стандарты IEEE 802.15.4a CSS (nanoLOC) & UWB. Таким образом, СПМ, построенные на базе этих стандартов, в равных условиях (одинаковые производственные площади, здания, помеховая обстановка) обладают лучшими характеристиками, по сравнению с решениями, использующими другие стандарты.
Обмен сообщениями с координатной и служебной информацией между инфраструктурой СПМ и мобильными объектами в региональных, зональных, а иногда и локальных системах производится:
- с использованием инфраструктуры, применяемой также для определения координат (обычно в системах Wi-Fi, RTLS и DECT);
- с использованием сетей связи общего пользования, чаще всего GSM (в зональных и региональных системах, использующих для определения координат информацию от спутниковых навигационных систем).
Методы определения местоположения
Говоря о технологиях собственно позиционирования, целесообразно назвать основные методы, использующиеся при определении местоположения и измерении координат мобильных объектов в радиосетях.
- RSS (Received Signal Strength) – расстояние до объекта оценивается по мощности (уровню) сигнала. Данный метод хорошо работает на малых расстояниях, но при увеличении дальности дает большую ошибку за счет специфики распространения радиосигнала.
- AoA (Angle of Arrival) – местонахождение абонента определяется в пределах площади треугольника, образованного пересечением осей диаграмм направленности антенн секторов трех базовых станций (модифицированный метод триангуляции).
- ToF (Time of Flight) – измерение времени прохождения электромагнитной волны от мобильного устройства до точки доступа за счет использования сигнала с линейно-частотной модуляцией.
- ToA (Time of Arrival) – измерение времени прохождения сигнала от мобильного терминала до базовой станции, при котором расстояние до объекта рассчитывается исходя из разницы времени отправки сигнала и его получения. При этом данный способ требует строгой синхронизации времени на отправителе и получателе, чего достигнуть достаточно сложно.
- TDoA (Time Difference of Arrival) – производится измерение разницы времени прихода сигнала от мобильного устройства до нескольких базовых станций. Так же как и при предыдущем способе, требуется строгая синхронизация времени, но только на базовых станциях, к мобильному устройству таких требований не предъявляется.
- RTT (Round TripTime). Базовая станция отправляет сигнал на мобильное устройство и дожидается получения ответного сигнала, по разнице времени отправки и получения сигнала определяется время прохождения сигнала в обоих направлениях, а следовательно, и расстояние между объектами.
- LPT (Location Patterning Techniques) – определение местоположения производится с использованием распознавания образов радиосигналов, основано на выборке и записи радиообразцов поведения сигнала в определенной окружающей среде.
- RF footprint or fingerprint – по уникальному радиочастотному следу – с использованием спектрального портрета сигнала.
- IMU (Inertial Measurement Unit) – инерциальная навигация с использованием датчиков движения мобильного устройства – акселерометра, гироскопа, магнитометра
При описании RSS применительно к Wi-Fi некоторые авторы указывают, что расстояние до абонента по RSS определяется точкой доступа. Однако в стандарте IEEE 802.11/a/b/g/n оценку уровня сигнала от точки доступа и сравнение отношения сигнал/шум от разных точек доступа производит абонентское устройство. Это связано с тем, что решение о переключении (переходе) с одной точки доступа на другую на основании RSS и SNR (Signal to Noise Ratio) также принимает абонент.
В наше время достаточно широко встречаются СПМ, в которых, по сути, происходит конвергенция технологий позиционирования. Таким примером являются СЦПТР стандартов TETRA, DMR (Digital Mobile Radio), APCO25, в которых, кроме голосовой связи, возможны обмен данными и позиционирование. Для решения задач позиционирования и мониторинга абонентов базовые станции СЦПТР, обеспечивающих одну общую зону обслуживания, объединяются каналами связи. На пунктах управления системами устанавливается специальное ПО, способное определить местоположение терминала с точностью до одной базовой станции. Для повышения точности позиционирования абонента используются GPS или ГЛОНАСС. При необходимости отслеживать абонента в помещениях и сооружениях в терминал устанавливается модуль, способный «видеть» абонента в закрытых пространствах в пределах заранее развернутой для такого позиционирования инфраструктуры (сети Wi-Fi, RealTrac, автономные «маяки» и др.). На открытом пространстве определение координат терминала происходит по GPS или ГЛОНАСС. При входе абонента в закрытое пространство и его перемещениях мониторинг осуществляется через систему локального позиционирования, а передача данных о местоположении может производиться как по каналу данных УКВ-системы, так и через систему, производящую мониторинг.
Большинство таких СПМ является системами специального назначения, используемыми спецслужбами, силовыми структурами, а также крупными федеральными ведомствами в топливно-энергетической и транспортной отраслях.
Задачи обмена информацией между мобильными объектами и инфраструктурой СПМ, как уже отмечено выше, решаются либо с применением беспроводных систем передачи данных, использующихся для собственно позиционирования, либо с применением сетей связи общего пользования. Особенности таких сетей и систем и требования к ним достаточно подробно изложены во многих публикациях.
Классификация по способу использования координатной информации
Важным свойством любой системы позиционирования и мониторинга является способ использования координатной информации. К таким способам относятся:
- локальный (без обратной связи) – с регистрацией и отображением координат/местоположения на мобильном устройстве-терминале, не имеющем обратной связи. Такой терминал является, по сути, только приемником, не включенным в контур управления автоматизированной или автоматической системой. Координатная информация, формирующаяся в нем, используется только оператором терминала. Такие приемные терминалы широко распространены в качестве обычных GPS/ГЛОНАСС-навигаторов;
- централизованный (с обратной связью). В этом случае мобильное устройство включено в контур определенной автоматизированной системы управления или автоматизированной системы сбора, обработки и представления информации. Иначе говоря, оно является частью такой системы.
В централизованной системе координатная информация, независимо от того получена она от средств-датчиков, находящихся на мобильном объекте или от внешних источников координатной информации, используется для обработки, построения, при необходимости маршрутов движения объекта и выдачи ее на отображение (визуализации).
Большинство систем позиционирования и мониторинга, в том числе локальных, представляет собой именно такие системы.
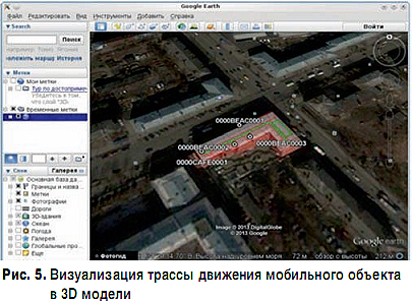
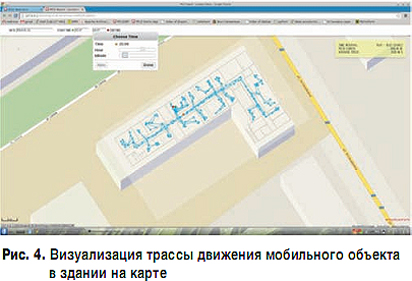
Необходимо отметить, что с целью обеспечения максимальной эффективности работы операторов этих систем, формы представления информации (информационные модели) даже в одной системе могут быть различны. Примеры различной визуализация объектов в локальной СПМ RealTrac приведены на рис. 4 и 5.
Свойства технологий
Выбор технологии для определения координат мобильных объектов зависит от постав л енной задачи – от того, какие свойства в конкретном случае требуются. Так, при выборе системы для решения задач локального позиционирования и мониторинга целесообразно учитывать следующее:
- решения на радиосетях стандарта DECT (Ericsson, Siemens DPS) не получили широкого распространения в связи с некоторыми особенностями работы и недостаточной точности (5–10 м) определения местоположения;
- применение радиосетей Wi-Fi (стандарт IEEE 802.11a/g/n) на оборудовании Aruba, Cisco, HP, работающих под соответствующим программным обеспечением, или на оборудовании любого другого производителя, функционирующего под ПО Ekahau, целесообразно только в случае, когда на предприятии уже развернута хорошо спланированная Wi-Fi-инфраструктура и требуется отслеживание оборудования, оснащенного Wi-Fi-устройством (смартфоны, ноутбуки, Wi-Fi-теги и пр.). При этом точность позиционирования таких систем составляет 5–10 м. Заявляемая производителями точность до 1 м достижима только при увеличении плотности точек доступа в 1,5–2 раза. Кроме того, не все оборудование стандарта IEEE 802.11a/g/n, ввозимое в страну, определено как оборудование для сетей малого радиуса действия, что накладывает некоторые ограничения на его использование;
- решения на базе радиосетей стандарта UWB (Time Domain, Zebra) дают хорошую точность (десятки сантиметров), но, к сожалению, имеют очень малый радиус действия (до 10– 15 м от стационарной точки) и пока имеют самую высокую стоимость;
- радиосети nanoLOC (стандарт IEEE 802.15.4a) – CSL, RTL-Service (Real Trac) дают высокую точность (до 1–3 м, а с использованием IMU – до 1 м), обладают значительным радиусом действия (до 500 м на открытой местности) и при этом решением ГКРЧ № 07-20-03-001 определены как устройства малого радиуса действия, что позволяет их применять без получения разрешений на использование радиочастот.